Nghiên cứu điều khiển nồng độ của sản 1phẩm trong bể chứa phản ứng có khuấy
bằng phương pháp ứng dụng bộ điều khiển nơron theo mô hình mẫu – Lương
Trung Thành (Tự động hóa)
..
PHẦN MỞ ĐẦU
I.Tính cấp thiết của đề tài.
Bộ não con người là sản phẩm hoàn hảo của tạo hoá. Để tiếp cận khả năng
tư duy của bộ não, người ta sử dụng khả năng suy diễn của hệ mờ dựa trên các
luật logic mờ. Để tiếp cận khả năng học, người ta đưa ra mô hình mạng nơron,
do vậy cấu trúc mạng nơron là điều rất đáng được quan tâm. Để tiếp cận cả hai
khả năng học và tư duy của bộ não người, người ta nghiên cứu khả năng tích
hợp của mạng nơron và hệ mờ. Trong công nghiệp tự động hoá giữ một vai
trò quan trọng trong quá trình sản xuất. Nhận dạng hệ thống là một trong những
công việc đầu tiên phải thực hiện khi giải quyết một bài toán điều khiển tự động,
nó quyết định chất lượng và hiệu quả của công việc điều khiển hệ thống về sau.
Để điều khiển chính xác đối tượng khi chưa biết rõ được thông số, trước tiên ta
phải hiểu rõ đối tượng đó. Bộ điều khiển nơron theo mô hình mẫu là phần tử phi
tuyến, nên điều khiển nó rất khó, đòi hỏi phải có độ chính xác cao. Vì vậy cần
ứng dụng bộ điều khiển thông minh là BĐK nơron theo mô hình mẫu. Được sự
tạo điều kiện giúp đỡ của nhà trường và Tiến sỹ Phạm Hữu Đức Dục, em đã lựa
chọn đề tài tốt nghiệp của mình là “Nghiên cứu điều khiển nồng độ của sản
phẩm trong bể chứa có khuấy bằng phương pháp ứng dụng bộ điều khiển nơron
theo mô hình mẫu.”
II. Ý nghĩa khoa học và thực tiễn của đề tài.
1. Ý nghĩa khoa học.
Điều khiển tự động đóng vai trò quan trọng trong sự phát triển khoa học và
kỹ thuật. Lĩnh vực này hữu hiệu khắp nơi từ hệ thống điều khiển trong các quy
trình sản xuất hiện đại, và ngay cả trong đời sống hàng ngày …
Mô hình điều khiển theo mô hình mẫu để điều khiển đối tượng, sao cho tín
hiệu cần điều khiển bám theo được tín hiệu của mô hình mẫu. Mô hình mạng
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
http://www.lrc-tnu.edu.vn
Nghiên cứu điều khiển nồng độ của sản 2phẩm trong bể chứa phản ứng có khuấy
bằng phương pháp ứng dụng bộ điều khiển nơron theo mô hình mẫu – Lương
Trung Thành (Tự động hóa)
nơron được sử dụng để hỗ trợ trong qúa trình học của bộ điều khiển. Do đó đề
tài sẽ đề cập tới việc ứng dụng bộ điều khiển theo mô hình mẫu để điều khiển
nồng độ của sản phẩm trong một bể chứa phản ứng có khuấy.
2. Ý nghĩa thực tiễn.
Kết quả nghiên cứu của đề tài có thể làm cơ sở cho việc thiết kế các mô
hình điều khiển theo mô hình mẫu trong các nhà máy công nghiệp, đặc biệt làm
tài liệu hỗ trợ cho việc học tập của sinh viên đại học và học viên cao học.
III. Mục đích của đề tài.
Nghiên cứu ứng dụng mạng nơron trong quá trình nhận dạng và điều khiển
hệ thống phi tuyến nói chung. Đặc biệt nghiên cứu sâu hơn về việc ứng dụng bộ
điều khiển nơron theo mô hình mẫu hệ thống được điều khiển, làm cơ sở cho
việc tạo ra tín hiệu điều khiển thích nghi được lựa chọn chính xác.
Tổng quan mạng nơron, đi sâu nghiên cứu mạng nơron truyền thẳng nhiều
lớp
Nghiên cứu bộ điều khiển nơron theo mô hình mẫu
Nghiên cứu động học của bể khuấy
Nghiên cứu các bộ điều khiển nơron dự báo, bộ điều khiển NAMA-L2, bộ
điều khiển nơron theo mô hình mẫu và bộ điều khiển nơron dự báo
Nghiên cứu các phương pháp nhận dạng điều khiền
Ứng dụng bộ điều khiển nơron theo mô hình mẫu để điều khiển nồng độ
của sản phẩm trong bể chứa phản ứng có khuấy
IV. Đối tƣợng nghiên cứu.
Nồng độ của sản phẩm trong bể chứa phản ứng có khuấy.
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
http://www.lrc-tnu.edu.vn
Nghiên cứu điều khiển nồng độ của sản 3phẩm trong bể chứa phản ứng có khuấy
bằng phương pháp ứng dụng bộ điều khiển nơron theo mô hình mẫu – Lương
Trung Thành (Tự động hóa)
V. Nhiệm vụ nghiên cứu.
Nghiên cứu điều khiển nồng độ của sản phẩm trong bể chứa có khuấy
bằng phương pháp ứng dụng bộ điều khiển nơron theo mô hình mẫu
VI. Phƣơng pháp nghiên cứu.
Tìm hiểu tài liệu và các công trình nghiên cứu liên quan tới bộ điều khiển
nơron theo mô hình mẫu
Lựa chọn đối tượng, mô tả toán học và nghiên cứu mô hình hóa mô
phỏng.
Lựa chon các giải pháp phù hợp cho 1 lớp đối tượng.
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
http://www.lrc-tnu.edu.vn
Nghiên cứu điều khiển nồng độ của sản 4phẩm trong bể chứa phản ứng có khuấy
bằng phương pháp ứng dụng bộ điều khiển nơron theo mô hình mẫu – Lương
Trung Thành (Tự động hóa)
CHƢƠNG 1. MẠNG NƠRON
1.1. CÁC KHÁI NIỆM CƠ BẢN
1.1.1. Mô hình nơron sinh học
Bộ não con người có khoảng 1011 nơron sinh học ở nhiều dạng khác nhau
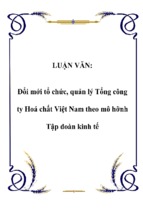
.Mô hình của một dạng nơron sinh học được mô tả trên hình vẽ. Cấu trúc chung
của một nơron sinh học gồm ba phần chính là thân, bên trong có nhân, cây và
trục. Cây gồm các dây thần kinh liên kết với thân. Trục có cấu trúc đơn, dài liên
kết với thân. Phần cuối của trục có dạng phân nhánh. Trong mỗi nhánh có một
cơ cấu nhỏ là khớp thần kinh, từ dây nơron sinh học này liên kết bằng tín hiệu
tới các nơron khác. Sự thu nhận thông tin của nơron sinh học được thực hiện từ
cây hoặc thân của nó. Tín hiệu thu, nhận ở dạng các xung điện.
Thân nơron
Trục nơron
Khớp
thần
kinh
Nhân nơron
Cây
Hình 1.1 Mô hình một dạng nơron sinh học
Mỗi tế bào thần kinh có một màng, nhiệm vụ của nó là giữ cho các chất
nuôi tế bào không tràn ra ngoài. Ở phần tử nội bào và ngoại bào có dung dịch
muối lỏng làm cho chúng bị phân ra thành các ion âm và các ion dương. Các ion
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
http://www.lrc-tnu.edu.vn
Nghiên cứu điều khiển nồng độ của sản 5phẩm trong bể chứa phản ứng có khuấy
bằng phương pháp ứng dụng bộ điều khiển nơron theo mô hình mẫu – Lương
Trung Thành (Tự động hóa)
dương có trong màng tạo ra điện thế màng với trạng thái cân bằng lực: Lực đẩy
của các ion dương ra khỏi tế bào cân bằng với lực hút chúng vào trong tế bào.
Điện thế màng là phần tử quan trọng trong quá trình truyền tin của hệ thần
kinh. Khi thay đổi thẳng thẩm thấu ion của màng thì điện thế màng của tế bào bị
thay đổi và tiến tới một ngưỡng nào đó, đồng thời sinh ra dòng điện, dòng điện
này gây ra phản ứng kích thích làm thay đổi khả năng thẩm thấu ion của các tế
bào thần kinh tiếp theo.
1.1.1.1. Xử lý thông tin trong bộ não
Thông tin được tiếp nhận từ các giác quan và chuyển vào các tế bào thần
kinh vận động và các tế bào cơ. Tại mỗi tê bào thần kinh tiếp nhận thông tin,
điện thế của nó tăng lên, nếu điện thế này vượt ngưỡng sẽ tạo dòng điện trong tế
bào thần kinh, ý nghĩa dòng điện đó được giải mã và lưu ở thần kinh trung ương,
kết quả xử lý thông tin được gửi đến các tế bào cơ.
Các tế bào thần kinh đều đưa ra các tín hiệu giống nhau, do đó không thể
phân biêt được đó là tế bào thần kinh của loài động vật nguyên thủy hay cuả
một giáo sư đáng kính. Các khớp thần kinh chỉ cho phép các tín hiệu phù hợp
qua chúng, còn các tín hiệu khác thì bị cản lại. Lượng tín hiệu đã được biến đổi
được goi là cường độ khớp thần kinh – đó chính là trọng số của nơron trong
mạng nơron.
Tại sao việc nghiên cứu về mạng thần kinh lại có tầm quan trọng như vậy
? Có thể trả lời ngắn gọn là do sự giống nhau của các tín hiệu của tế bào thần
kinh đơn lẻ, nên chức năng thật sự của bộ não không phụ thuộc vào vai trò của
một tế bào thần kinh, mà phụ thuộc vào toàn bộ các tế bào thần kinh, tức là phụ
thuộc vào kiểu kết nối của các tế bào thần kinh liên kết với nhau để tạo nên một
mạng thần kinh hay một mạng nơron.
1.1.1.2.Câc đặc tính cơ bản của não ngƣời
Tính phân lớp: Các vùng trong bộ não được phân thành nhiều lớp, ở đó
thông tin được xử lý theo tính chất tương ứng của mỗi lớp đặc thù.
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
http://www.lrc-tnu.edu.vn
Nghiên cứu điều khiển nồng độ của sản 6phẩm trong bể chứa phản ứng có khuấy
bằng phương pháp ứng dụng bộ điều khiển nơron theo mô hình mẫu – Lương
Trung Thành (Tự động hóa)
Tính mô đun: Các vùng của bộ nhớ được phân thành các mô đun được mã
hóa bằng các định nghĩa mối quan hệ tích hợp giữa các tín hiệu vào qua các
giác quan với các tín hiệu ra.
Mối liên kết: Liên kết giữa các lớp dẫn đến các dữ liệu dùng chung được
xem như các liên hệ phản hồi khi truyền tín hiệu
Xử lý phân tán các tín hiêu vào: Các tín hiệu vào được truyền qua nhiều
kênh thông tin khác nhau, được xử lý bởi các phương pháp đặc biệt.
1.1.2. PHẦN TỬ XỬ LÝ
Mô hình phần tử xử lý (processing
elements)dạng M-P, do Culloch
x1
và Pitts đề xuất năm 1943
xi
Phần tử xử lý thứ i
wi1
wij
vi
a(.)
yi
Phần tử xử lý có dạng nhiều vào
một ra ( MISO). Hình vẽ 1.2 mô
xm-1 wi(m-1)
tả mô hình của phần tử xử lý (mô
xm= -1
hình một nơron) thứ i, dạng M-P,
trong đó có các phần sau đây.
wim= bi
Hình1.2.
Mô hình phần tử xử lý thứ i,dạng M-P
Tín hiệu đầu vào
Có m tín hiệu đầu vào. Trong đó (m-1) tín hiệu là tín hiệu kích thích ở đầu
vào là (x1….xj,…xm-1), chúng được lấy từ đầu ra của các nơron được đặt trươc
nơron này hoặc được lấy từ cac nguồn tín hiệu đầu vào khác. Các tín hiệu kích
thích đầu vào này được đưa qua một bộ trọng số (weight) wij đặc trưng cho mức
độ liên kết giữa các nơron thứ j (j= 1,2…….m-1) với nơron thứ i. Trọng số liên
kết có giá trị dương tương ứng với khớp thần kinh bị kích thích, ngược lại có giá
trị âm tương ứng với khớp thần kinh bị kiềm chế.
Riêng thành phần tín hiệu vào thứ m là xm được gọi là ngưỡng (threshold)
có giá trị xm = -1, tín hiệu xm được đưa qua thành phần thành phần dịch chuyển
(bias) bi
wim = bi
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
(1.1)
http://www.lrc-tnu.edu.vn
Nghiên cứu điều khiển nồng độ của sản 7phẩm trong bể chứa phản ứng có khuấy
bằng phương pháp ứng dụng bộ điều khiển nơron theo mô hình mẫu – Lương
Trung Thành (Tự động hóa)
Tín hiệu ra
Có một tín hiệu ra yi
Bộ cộng
Thực hiện phép tính tổng trọng Vi bằn cách so sánh tổng trọng của (m-1)
kích thích đầu vào với giá trị trọng lượng của ngưỡng, nếu tổng trọng của (m-1)
đầu vào vượt qua trọng lượng của ngưỡng thì nơron ở trạng thái bị kích thích để
tạo ra được tín hiệu ra yi.
m 1
Neti =V= WijXj +bixm
(1.2)
j 1
Thành phần bi về cơ bản giống với trọng số wij, nó chỉ khác là luôn liên
kết tín hiệu xm = -1. Do đó cũng có thể coi bi là trong số liên kết thứ m là wm của
nơron thứ i. Nối với tín hiệu thứ m là xm luôn có giá trị là -1. Viết lại biểu thức
(1.2) ở dạng
m 1
Neti = V= WijXj + bixm
(1.3)
j 1
Với wim = bi và xm = 1
Hàm chuyển đổi
Hàm chuyển đổi (tranferfunction), có tài liêu gọi là hàm hoạt hóa
activation function, có nhiệm vụ biến đổi tổng trọng v i (hoặc neti) thành tín hiệu
đầu ra yi:
yi = a(neti) = a(vi)
(1.4)
trong đó a(.) là ký hiệu của hàm chuyển đổi
Có các dạng chuyển đổi thường dùng như sau:
- Hàm chuyển đổi dạng giới hạn cứng
Hàm chuyển đổi dạng giới hạn cứng như hình vẽ dưới đây còn có tên gọi
là hàm chuyển đổi dạng bước nhảy có biểu thức sau:
1 nếu v 0
a(v) = sgn(v) =
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
(1.5)
http://www.lrc-tnu.edu.vn
Nghiên cứu điều khiển nồng độ của sản 8phẩm trong bể chứa phản ứng có khuấy
bằng phương pháp ứng dụng bộ điều khiển nơron theo mô hình mẫu – Lương
Trung Thành (Tự động hóa)
0 nếu v < 0
- Hàm chuyển đổi dạng giới hạn cứng đối xứng
Hàm chuyển đổi dạng giới hạn cứng đối xứng (symmetric hard limit tranfer
function), còn gọi là hàm dấu (Hình 1.3b) có biểu thức như sau:
1 nếu v 0
a(v) = sgn(v) =
(1.6)
- 1 nếu v< 0
Các nơron có hàm chuyển đổi a(.) ở dạng hàm giới hạn cứng đối xứng được
gọi là phần tử ngưỡng tuyến tính ( Linear Threshold Unit- LTU).
- Hàm chuyển đổi dạng tuyến tính bão hoà
Hàm chuyển đổi dạng tuyến tính bão hòa (Hình 1.3c), có biểu thức sau:
1 nếu v > 0
a (v) =
v nếu 0 v 1
(1.7)
0 nếu v <1
- Hàm chuyển đổi dạng tuyến tính bão hòa đối xứng
Hàm chuyển đổi dạng tuyến tính bão hòa đối xứng (Hình 1.3 d), có biểu
thức sau:
-1 nếu v < -1
a (v) =
v nếu -1 v 1
(1.8)
0 nếu v > 1
- Hàm chuyển đổi dạng sigmoid
Hàm chuyển đổi dạng sigmoid (Hình1.3e) có biểu thức sau:
a (v) =
1
1 e v
(1.9)
- Hàm chuyển đổi dạng hypebolic
Hàm chuyển đổi dạng hypebolic (Hình 1.3f) có dạng sau:
a (v)=
2
-1
1 e v
(1.10)
trong đó > 0 là hệ số tốc độ của các dạng hàm chuyển đổi (1.9), ( 1.10)
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
http://www.lrc-tnu.edu.vn
Nghiên cứu điều khiển nồng độ của sản 9phẩm trong bể chứa phản ứng có khuấy
bằng phương pháp ứng dụng bộ điều khiển nơron theo mô hình mẫu – Lương
Trung Thành (Tự động hóa)
Các nơron có hàm chuyển đổi a(.) ở các dạng hàm sigmoi hoặc tang
hypecbolic được gọi là phần tử mức tuyến tính
Mạng nơron thường sử dụng các nơron ở các dạng LTU và LGU.
- Hàm chuyển đổi dạng tuyến tính
Hàm chuyển đổi dạng tuyến tính (Hình 1.3g) có biểu thức sau:
a(v) = v
1
0.8
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
-1
-5
-4
-3
-2
-1
0
1
2
3
4
v5
3
4
v5
Hình 1.3. (a): Hàm giới hạn cứng
1
0.8
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
.
1
5
-4
-3
-2
-1
0
1
2
Hình 1.3. (b ): Hàm giới hạn cứng đối xứng
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
http://www.lrc-tnu.edu.vn
Nghiên cứu điều khiển nồng độ của sản10
phẩm trong bể chứa phản ứng có khuấy
bằng phương pháp ứng dụng bộ điều khiển nơron theo mô hình mẫu – Lương
Trung Thành (Tự động hóa)
1
0.8
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
-1
-5
-4
-3
-2
-1
0
1
2
3
4
Hình 1.3.(c): Hàm tuyến tính bão hòa
1
0.8
0.6
0.4
0.2
0
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
http://www.lrc-tnu.edu.vn
v5
Nghiên cứu điều khiển nồng độ của sản11
phẩm trong bể chứa phản ứng có khuấy
bằng phương pháp ứng dụng bộ điều khiển nơron theo mô hình mẫu – Lương
Trung Thành (Tự động hóa)
-0.2
-0.4
-0.6
-0.8
-1
-5
-4
-3
-2
-1
0
1
2
3
4
v5
4
v5
Hình 1.3. (d ): Hàm tuyến tính bão hòa đối xứng
1
0.8
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
-0.8
-1
-5
-4
-3
-2
-1
0
1
2
3
Hình 1.3. (e ):Hàm sigmoid
1
0.8
0.6
0.4
0.2
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
http://www.lrc-tnu.edu.vn
Nghiên cứu điều khiển nồng độ của sản12
phẩm trong bể chứa phản ứng có khuấy
bằng phương pháp ứng dụng bộ điều khiển nơron theo mô hình mẫu – Lương
Trung Thành (Tự động hóa)
0
-0.2
-0.4
-0.6
-0.8
-1
-5
-4
-3
-2
-1
0
1
2
3
4
3
4
v5
Hình 1.3.(f): Hàm tang hy perbolic
5
4
3
2
1
0
1
2
3
4
5
4
3
2
1
0
1
2
v
5
Hình 1.3( g): Hàm tuyến tính
Mô hình ở dạng ký hiệu đơn giản của nơron thứ i được trình bày như hình
1.4. Trong đó nơron được ký hiệu là một vòng tròn được xem như là một tế bào
thần kinh, nó có mối liên kết với các nơron khác qua các trọng số wij,
j = (1,2,….,xm), có một đầu ra là [x1, x2,.....,xm ], và có một đầu ra là yi.. Trong đó
thành phần số thứ m là wim = bi được nối với tín hiệu đầu vào thứ m là x m= -1,
nhưng không nhất thiết nơron nào cũng cần phải có phần tử này.
x1
wi1
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
http://www.lrc-tnu.edu.vn
Nghiên cứu điều khiển nồng độ của sản13
phẩm trong bể chứa phản ứng có khuấy
bằng phương pháp ứng dụng bộ điều khiển nơron theo mô hình mẫu – Lương
Trung Thành (Tự động hóa)
nơron thứ i
.
.
.
yi
wij
xj
.
.
.
.
wim = bi
xm = -1
Hình 1.4. Mô hình đơn giản của nơron thứ i
1.1.3. CÁC LOẠI MÔ HÌNH CẤU TRÚC MẠNG NƠRON
Mạng nơron bao gồm sự liên kết của nhiều nơron. Đầu ra của mỗi nơron
kết nối với các nơron khác thông qua các trọng số, hoặc tự phản hồi trở về đầu
vào của cấu trúc của mạng nơron là kiểu kết nối hình học của mỗi nơron liên kết
trong mạng, đây là một đặc điểm quan trọng của từng mạng nơron, dựa vào đó
tiến hành phân loại chúng. Hình 1.5 mô tả một số loại nơron thường gặp.
Hình 1.5a mô tả mạng truyền thẳng một lớp (single - layer feedforward
networks) có đặc điểm tất cả các nơron đều nhận tín hiệu vào từ nguồn bên
ngoài qua các biến trọng số và mỗi nơron đều cho ra một tín hiệu ra.
Hình 1.5b mô tả mạng truyền thẳng nhiều lớp (Multilayrer feedforward
networks). Lớp vào (Input layer) gồm các nơron nhận trực tiếp các tín hiệu vào
lấy từ bên ngoài. Lớp ra (Output layer) gồm các nơron có các tín hiệu ra, đưa ra
bên ngoài mạng. Lớp ẩn (hidden layer) gồm các nơron còn lại không nhận trực
tiếp các tín hiệu vào lấy từ bên ngoài và không cung cấp tín hiệu ra cho bên
ngoài mạng, nó chỉ có nhiệm vụ truyền tín hiệu từ các nơron ở lớp vào đến các
nơron ở lớp ra. Mạng nơron truyền thẳng nhiều lớp có một lớp vào, một lớp ra,
có thể không có hoặc có nhiều lớp ẩn. Một mạng được gọi là liên kết đầy đủ nếu
mỗi nơron ở các lớp trước liên kết với tất cả các nơron ở lớp ngay sau nó. Mạng
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
http://www.lrc-tnu.edu.vn
Nghiên cứu điều khiển nồng độ của sản14
phẩm trong bể chứa phản ứng có khuấy
bằng phương pháp ứng dụng bộ điều khiển nơron theo mô hình mẫu – Lương
Trung Thành (Tự động hóa)
nơron ở hình 1.5b là loại mạng nơron truyền thẳng có 3 lớp, có liên kết không
đầy đủ.
Nếu mạng nơron có các tín hiệu đầu ra được đưa ngược trở lại đầu vào
của các nơron ở các lớp trước nó hoặc chính nó thì mạng đó được gọi là mạng
phản hồi (Feedback network).
Mạng phản hồi ở các vòng kín được gọi là mạng hồi quy (recurrent
network). Hình 1.5c mô tả một loại mạng hồi quy đơn giản nhất, chỉ có một
nơron có tín hiệu ra tự phản hồi về đầu vào của chính nó.
Mạng một lớp có liên kết phản hồi như hình 1.5d có đặc điểm tín hiệu đầu
ra của mỗi nơron được đưa ngược trở lại đầu vào của chính nó hoặc của các
nơron khác được gọi là mạng hồi quy một lớp.
Hình 1.5e mô tả mạng cấu trúc ngang - hạn chế (Lateral-inhibition
network), mạng này có 2 loại tín hiệu đầu vào khac nhau: các đầu vào kích thích
(Exitatory inputs) ứng với các tín hiệu vào có gắn kí hiệu vòng rỗng (0) và đầu
vào hạn chế (Inhibition inputs) với các tín hiệu vào có gắn kí hiệu vòng đặc( ).
Hình 1.1f mô tả mạng hồi quy nhiều lớp.
x1
y1
x1
y1
x2
y2
x2
y2
x2
yn
xm
yn
(a)
y2
x1
, (b)
x1
yn
x2
y1
y2
x2
y
xm
xm yn
yn
(d)
(c)
yn
y1
x2
y1
y2
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
y n
xm
(a)
y2
http://www.lrc-tnu.edu.vn
yn
Nghiên cứu điều khiển nồng độ của sản15
phẩm trong bể chứa phản ứng có khuấy
bằng phương pháp ứng dụng bộ điều
x1 khiển nơron theo mô hình mẫu – Lương
Trung Thành (Tự động hóa)
x2
xm
(f)
(e)
Hình 1.5. Cấu trúc của một số loại mạng nơron thường gặp
(a) Mạng nơron truyền thẳng một lớp
(b). Mạng nơron truyền thẳng nhiều lớp
(c). Mạng nơron chỉ có một nơron tự hồi quy
(d). Mạng nơron hồi quy một lớp
(e) Mạng có cấu trúc ngang - hạn chế
(f) Mạng nơron hồi quy nhiều lớp.
1.1.4. CÁC TÍNH CHẤT CỦA MẠNG NƠRON
Mạng nơron có một số tính chất sau đây:
- Là hệ phi tuyến
- Là hệ xử lý song song: mạng nơron có cấu trúc song song, do đó có tốc
độ tính toán rất cao, rất phù hợp với lĩnh vực nhận dạng và điều khiển.
- Là hệ học và thích nghi: Mạng được luyện từ các số liệu quá khứ, có khả
năng tự điều chỉnh khi số liệu đầu vào bị mất, có thể điều khiển on-line
- Là hệ nhiều biến, là hệ nhiều đầu vào, nhiều đầu ra (MIMO) rất tiện
dùng khi điều khiển đối tượng khi có nhiều biến số.
1.1.5. CÁC LUẬT HỌC
Mạng nơron sử dụng hai nhóm luật học:
nhóm các luật học thông số (Parameter learning rules) và nhóm các luật học cấu
trúc (Structure learning rules)
Các luật học trong nhóm học thông số có nhiệm vụ tính toán cập nhập giá
trị của trọng số liên kết các nơron trong mạng.
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
http://www.lrc-tnu.edu.vn
Nghiên cứu điều khiển nồng độ của sản16
phẩm trong bể chứa phản ứng có khuấy
bằng phương pháp ứng dụng bộ điều khiển nơron theo mô hình mẫu – Lương
Trung Thành (Tự động hóa)
Các luật học trong nhóm học cấu trúc có nhiệm vụ đưa ra cấu trúc hợp lý
của mạng như thay đổi số lượng nơron hay thay đổi số lượng liên kết của các
nơron có trong mạng
Hai nhóm luật học trên có thể được áp dụng đồng thời (khi đó gọi là các
luật học lai - hybrid learning rules) học cả cấu trúc và thông số, hoặc được áp
dụng riêng rẽ.
Sau đây trình bày các luật học thông số với các giả thiết:
- Cấu trúc của mạng nơron gồm số lượng lớp nơron, số lượng nơron và
cách thức liên kết của các trọng số có trong mạng đã hợp lý
- Ma trận trọng số đã bao gồm tất cả các phần tử thích ứng
Nhiệm vụ của học thống số là đưa ra phương pháp nào đó để tìm ra ma
trận trọng số điều chỉnh từ ma trận trọng số tùy chọn ban đầu với cấu trúc của
mạng nơron đã được xác định từ trước, thỏa mãn điều kiện sai lệch trong phạm
vi cho phép.
Để làm được việc đó, mạng nơron sử dụng các phương pháp học thích
ứng để tính toán được các ma trận trọng số điều chỉnh w đặc trưng cho mạng.
Có 3 kiểu học là: Học có giám sát, học củng cố và học không có giám sát.
1.1.5.1. Học có giám sát
Cho trước p cặp mẫu tín hiệu vào – ra sau đây:
(x(1),d(1)),…,(x(k),d(k)), …,(x(p),d(p)),
Với x là véc tơ tín hiệu mẫu đầu vào x = [(x(1),x(2),…, x(p)]T và d là véc tơ tín
hiệu đầu ra mong muốn d = [(d(1),d(2),…, d(p)]T
Khi đưa một mẫu tín hiệu là x(k) vào đầu vào của mạng nơron, ở đầu ra có
một tín hiệu ra tương ứng là y(k). Sai lệnh giữa hai véc tơ tín hiệu d, y có nhiệm
vụ điều chỉnh véc tơ trọng số w của mạng nơron sao cho véc tơ tín hiệu ra y của
mạng bám theo được véc tơ tín hiệu ra mong muốn d, nói cách khác là để giảm
thiểu sai lệch giữa chúng. Như vậy kiểu học có giám sát (Hình 1.6a) có đặc điểm
là cần có tín hiệu đầu ra mong muốn d được lấy từ bên ngoài.
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
http://www.lrc-tnu.edu.vn
Nghiên cứu điều khiển nồng độ của sản17
phẩm trong bể chứa phản ứng có khuấy
bằng phương pháp ứng dụng bộ điều khiển nơron theo mô hình mẫu – Lương
Trung Thành (Tự động hóa)
1.1.5.2. Học củng cố
Trong quá trình học giám sát, giả thiết rằng đáp ứng đầu ra của mạng đã
đạt được giá trị mong muốn nhưng ở một mẫu vào – ra nào đó bị cho rằng có kết
quả không đáng tin cậy, vì vậy cần phải tiến hành kiểm tra lại mẫu nói trên. Khi
đó chỉ có một bit tín hiệu của mẫu cần kiểm tra đóng vai trò là tín hiệu củng cố
được đưa vào mạng để góp phần khẳng định kết quả quá trình học có giám sát
đúng hay sai. Kiểu học này được gọi là kiểu học củng cố (Hình 1.6b). Kiểu học
này cũng có tín hiệu củng cố được lấy từ bên ngoài nên nó chỉ là một trường hợp
đặc biệt của kiểu học có giám sát.
1.1.5.3. Học không có giám sát
Kiểu học này có đặc điểm là không có tín hiệu lấy từ bên ngoài. Mạng cần
phải tự mình tìm ra các mẫu, nét đặc trưng, sự tương thích, phân loại trong dữ
liệu đầu vào và mã hóa thành các mẫu ở đầu ra. Trong quá trình học không giám
sát (Hình 1.6c) nếu mạng không thay đổi thông số của nó thì được gọi là tự tổ
chức (self-organizing)
Hình 1.7. trình bày luật học trong số ở dạng cơ bản nhất cho nơron thứ i.
Trong đó véc tơ tín hiệu vào: x = [(x1,x2,…, xj,....xm]T có thể được lấy từ các
nơron khác hoặc được lấy từ bên ngoài. Thành phần thông số ngưỡng có thể
được thay thế bằng thành phần thứ m của véc tơ tín hiệu vào x là x m = -1 được
kết nối với trọng số wim = bi.
Véc tơ trọng số liên kết của nơron thứ i là : wi = [ wi1, wi2,…, wim]T
X
Y
Mạng
nơron
Tín hiệu
ra
W
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
Tín hiệu
sai lệch
Máy phát
tín hiệu
sai lệch
d
http://www.lrc-tnu.edu.vn
Tín hiệu ra
Nghiên cứu điều khiển nồng độ của sản18
phẩm trong bể chứa phản ứng có khuấy
bằng phương pháp ứng dụng bộ điều khiển nơron theo mô hình mẫu – Lương
Trung Thành (Tự động hóa)
X
Y
Mạng
nơron
Tín hiệu
vào
Tín hiệu
ra
W
Tín hiệu
đánh giá
Máy phát
tín hiệu
đánh giá
(b)
X
Tín hiệu vào
Tín hiệu
củng cố
Y
Mạng
nơron
Tín hiệu ra
W
(c)
Hình 1.6. Sơ đồ ba kiểu học của mạng nơron
(a). Học có giám sát
(b). Học củng cố
(c). Học không có giám sát
x1
wi1
x2
wi2
Nơron
thứ i
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
http://www.lrc-tnu.edu.vn
Nghiên cứu điều khiển nồng độ của sản19
phẩm trong bể chứa phản ứng có khuấy
bằng phương pháp ứng dụng bộ điều khiển nơron theo mô hình mẫu – Lương
Trung Thành (Tự động hóa)
yi
wij
wi
xj
wij
di
xm-1
x
r
xm =-1
Hình 1.7. Luật học trọng số ở dạng cơ bản
- Yêu cầu đối với hai kiểu học có giám sát và học củng cố
Cần phải có tín hiệu mong muốn ở đầu ra d i, các trọng số của noirron thứ
i được điều chính theo giá các trị của tín hiệu vào, tín hiệu đầu ra và tín hiệu
đầu ra mong muốn của nó. Nghĩa là cần đưa ra một luật học với mục đích là
thay đổi vectơ trọng số wi sao cho các tín hiệu đầu ra của nơron thứ i là yi bám
theo được tín hiệu đầu ra mong muốn di (Hình 1.7).
- Yêu cầu đối với kiểu học không có giám sát
Trọng số của nơron thứ i chỉ phụ thuộc vào giá trị của sự kết hợp của tín
hiệu đầu vào and/or với tín hiệu đầu ra.
Nói chung các luật học trọng số đều có sự thay đổi giá trị của véctơ trọng
số liên kết của nơron thứ i là wi tại thời điểm t phù hợp với tín hệu học r và tín
hệu vào x(t):
wi(t)= rx(t)
(1.1)
Với là số dương gọi là hằng số học (learning constant) đặc trưng cho tốc độ
học của mạng, thông thường 0 < < 1
Tín hiệu học r thông thường phụ thuộc vào wi, x, di
r = fr (wi, x, di)
(1.2)
Biểu thức tính véc tơ trọng số của nơron thứ i tại (t+1) như sau:
wi(t+1) = (wi(t) + ft (wi(t), x(t), di(t))x(t)
Ở dạng liên tục có thể viết lại là
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
http://www.lrc-tnu.edu.vn
(1.3)
Nghiên cứu điều khiển nồng độ của sản20
phẩm trong bể chứa phản ứng có khuấy
bằng phương pháp ứng dụng bộ điều khiển nơron theo mô hình mẫu – Lương
Trung Thành (Tự động hóa)
dwi (t )
rx(t)
dt
(1.4)
Từ các biểu thức trên ta thấy rằng ở các luật học trọng số nói chung
đều tập trung vào xác định tín hiệu học r trong biểu thức cập nhật trọng số của
mạng nơron.
1.2. CÁC MẠNG NƠRON TRUYỀN THẲNG SỬ DỤNG LUẬT HỌC GIÁM
SÁT
1.2.1. MẠNG ADALINE
Phần này trình bày phần tử Adaline và mạng Adaline, trong đó bao gồm
cấu trúc, luật học và các ví dụ ứng dụng chúng trong các bài toán nhận mẫu.
1.2.1.1. Phần tử Adaline
Phần tử Adaline ( Adaptive Linear Element –phần tử tuyến tính thích nghi)
được Windrow và Hoffddeef xuất vào năm 1960 và đươc coi là hệ thống tự học
thông minh đơn giản nhất.
Cấu trúc
Chỉ có nơron tuyến tính
Tín hiệu vào x có dạng vectơ cột có m phần tử x = [ x1,x2........,xm]Tcó một
tín hiệu ra y; véctơ trọng số: w = [w1,w2..........,wm]T; hàm chuyển đổi a(.) có
dạng tuyến tính.
Tín hiệu ra y được tính theo biểu thức:
y = a(v) = a[
m
m
j 1
j 1
WjXi ] = WjXi
(1.5)
y = a(v) = a( wTx) = wTx
Hoặc :
(1.6)
Với wT là chuyển vị của vectơ w
Luật học
Cho trước bộ mẫu tín hiệu vào – ra gồm p phần tử:
{ (x(1),d(1)), (x(2),d(2)),........, (x(p),d(p))}
Trong đó mẫu tín hiệu đầu vào thứ k:
Số hóa bởi Trung tâm Học liệu – Đại học Thái Nguyên
http://www.lrc-tnu.edu.vn
(1.7)
- Xem thêm -