..
ĐẠI HỌC THÁI NGUYÊN
TRƯỜNG ĐẠI HỌC KỸ THUẬT CÔNG NGHIỆP
DƯƠNG QUỐC TUẤN
NGHIÊN CỨU ĐIỀU KHIỂN HỆ THỐNG TRUYỀN ĐỘNG
SỬ DỤNG ĐỘNG CƠ ĐỒNG BỘ TỪ THÔNG DỌC TRỤC
KÍCH TỪ NAM CHÂM VĨNH CỬU
LUẬN ÁN TIẾN SĨ KỸ THUẬT
THÁI NGUYÊN - 2020
Số hóa bởi Trung tâm Học liệu và Công nghệ thông tin – ĐHTN
http://lrc.tnu.edu.vn
ĐẠI HỌC THÁI NGUYÊN
TRƯỜNG ĐẠI HỌC KỸ THUẬT CÔNG NGHIỆP
DƯƠNG QUỐC TUẤN
NGHIÊN CỨU ĐIỀU KHIỂN HỆ THỐNG TRUYỀN ĐỘNG
SỬ DỤNG ĐỘNG CƠ ĐỒNG BỘ TỪ THÔNG DỌC TRỤC
KÍCH TỪ NAM CHÂM VĨNH CỬU
Chuyên ngành: Kỹ thuật điều khiển và Tự động hóa
Mã số: 9 52 02 16
LUẬN ÁN TIẾN SĨ KỸ THUẬT
NGƯỜI HƯỚNG DẪN KHOA HỌC:
PGS.TS. Nguyễn Như Hiển
PGS.TS. Trần Xuân Minh
THÁI NGUYÊN - 2020
Số hóa bởi Trung tâm Học liệu và Công nghệ thông tin – ĐHTN
http://lrc.tnu.edu.vn
LỜI CAM ĐOAN
Tên tôi là Dương Quốc Tuấn, hiện đang công tác tại Bộ môn Tự động hóa –
Khoa Điện – Trường Đại học Kỹ thuật Công nghiệp – Đại học Thái Nguyên. Tôi xin
cam đoan đây là công trình nghiên cứu của cá nhân tôi dưới sự hướng dẫn của tập thể
các nhà khoa học và các tài liệu tham khảo đã trích dẫn. Kết quả nghiên cứu là trung
thực và chưa được công bố trên bất cứ một công trình nào khác.
Thái Nguyên, ngày
tháng 06 năm 2020
Tác giả luận án
Dương Quốc Tuấn
Số hóa bởi Trung tâm Học liệu và Công nghệ thông tin – ĐHTN
http://lrc.tnu.edu.vn
LỜI CẢM ƠN
Trong suốt quá trình học tập, nghiên cứu và hoàn thiện luận án này, tôi đã nhận
được sự hướng dẫn, giúp đỡ quý báu của các thầy cô, các anh chị, các em, các bạn và
các tổ chức. Với lòng kính trọng và biết ơn sâu sắc tôi xin được bày tỏ lời cảm ơn
chân thành tới:
Ban Giám hiệu, Phòng Đào tạo, Khoa Điện của trường đại học Kỹ thuật Công
nghiệp thuộc Đại học Thái Nguyên, Viện Nghiên cứu Phát triển Công nghệ cao về
Kỹ thuật Công nghiệp thuộc Đại học Thái Nguyên và Đại học Thái Nguyên đã tạo
mọi điều kiện thuận lợi giúp đỡ tôi trong quá trình học tập, nghiên cứu và hoàn thiện
luận án.
PGS.TS. Nguyễn Như Hiển và PGS.TS. Trần Xuân Minh, những người thầy
kính mến đã tận tình hướng dẫn, chỉ bảo, động viên và tạo mọi điều kiện thuận lợi
cho tôi.
Tập thể các nhà khoa học của Bộ môn Tự động hóa, Khoa Điện trường Đại
học Kỹ thuật Công nghiệp, Viện Kỹ thuật Điều khiển và Tự động hóa của trường Đại
học Bách khoa Hà Nội, đã có những ý kiến đóng góp quý báu để tôi hoàn chỉnh bản
luận án này.
Xin chân thành cảm ơn bố mẹ, các em và người vợ yêu quý cùng con trai đã
luôn luôn bên tôi, hết lòng thương yêu, quan tâm, sẻ chia, ủng hộ, động viên tinh thần,
tình cảm, tạo điều kiện giúp tôi có nghị lực để hoàn thành quyển luận án này.
Thái Nguyên, ngày
tháng 06 năm 2020
Tác giả luận án
Dương Quốc Tuấn
Số hóa bởi Trung tâm Học liệu và Công nghệ thông tin – ĐHTN
http://lrc.tnu.edu.vn
Mục lục
MỤC LỤC
LỜI CAM ĐOAN ........................................................................................................ i
LỜI CẢM ƠN ............................................................................................................ iv
MỤC LỤC ................................................................................................................... v
DANH MỤC CÁC BẢNG BIỂU .............................................................................vii
DANH MỤC CÁC KÝ HIỆU, CÁC CHỮ VIẾT TẮT .......................................... viii
DANH MỤC HÌNH VẼ ............................................................................................xii
MỞ ĐẦU ..................................................................................................................... 1
1. Tính cấp thiết của đề tài .......................................................................................... 1
2. Đối tượng, phạm vi và phương pháp nghiên cứu.................................................... 2
3. Mục tiêu của luận án ............................................................................................... 3
4. Những đóng góp mới, ý nghĩa khoa học và thực tiễn của luận án .......................... 3
5. Bố cục của luận án .................................................................................................. 4
CHƯƠNG 1 : TỔNG QUAN VỀ ĐCĐB TỪ THÔNG DỌC TRỤC CÓ TÍCH
HỢP Ổ ĐỠ TỪ 5
1.1 Mở đầu .................................................................................................................. 5
1.2 Sự phát triển của máy điện đồng bộ kích từ nam châm vĩnh cửu từ thông dọc trục
6
1.3 Các kiểu máy điện từ thông dọc trục kích từ nam châm vĩnh cửu ....................... 7
1.3.1 Các cấu hình cơ bản của động cơ đồng bộ từ thông dọc trục .................... 9
1.3.2 Lựa chọn cấu hình động cơ đồng bộ từ thông dọc trục ........................... 10
1.3.3 Mô hình truyền thống về ổ đỡ trục động cơ ............................................ 11
1.3.4 Mô hình ĐC thông dụng sử dụng ổ từ đỡ trục ĐC .................................. 11
1.3.5 Mô hình tích hợp ổ từ dọc trục vào động cơ đồng bộ từ thông dọc trục . 13
1.4 Tình hình nghiên cứu trong và ngoài nước ........................................................ 14
1.4.1 Tình hình nghiên cứu trong nước ............................................................ 15
1.4.2 Tình hình nghiên cứu ngoài nước ............................................................ 16
1.5 Định hướng nghiên cứu của luận án ................................................................... 28
1.6 Kết luận............................................................................................................... 29
CHƯƠNG 2 : MÔ HÌNH HÓA ĐỘNG CƠ ĐỒNG BỘ TỪ THÔNG DỌC TRỤC
KÍCH TỪ NCVC TÍCH HỢP Ổ ĐỠ TỪ DỌC TRỤC............................................. 30
2.1 Cấu tạo và nguyên lý làm việc của động cơ đồng bộ từ thông dọc trục kích từ
nam châm vĩnh cửu ................................................................................................... 30
Số hóa bởi Trung tâm Học liệu và Công nghệ thông tin – ĐHTN
http://lrc.tnu.edu.vn
Mục lục
2.1.1 Cấu tạo ..................................................................................................... 30
2.1.2 Nguyên lý làm việc động cơ đồng bộ từ thông dọc trục NCVC ............. 31
2.2 Mô hình toán học của động cơ từ thông dọc trục kích từ NCVC....................... 32
2.2.1 Đặt vấn đề ................................................................................................ 32
2.2.2 Mô hình toán học của động cơ đồng bộ từ thông dọc trục tích hợp chức
năng ổ từ dọc trục trên hệ tọa độ đồng bộ từ thông ........................................... 33
2.3 Tính toán lực hút dọc trục................................................................................... 36
2.3.1 Xác định lực dọc trục của ĐCĐB từ thông dọc trục kích từ nam châm vĩnh
cửu 36
2.3.2 Mô hình toán học của ĐC AFPM ............................................................ 47
2.4 Kết luận............................................................................................................... 49
CHƯƠNG 3 :
ĐIỀU KHIỂN ĐỘNG CƠ ĐỒNG BỘ TỪ THÔNG DỌC TRỤC 51
3.1 Cấu trúc điều khiển vectơ động cơ AFPM ......................................................... 51
3.1.1 Cấu trúc điều khiển tổng quát .................................................................. 51
3.1.2 Thiết kế điều khiển động cơ AFPM bằng phương pháp kinh điển ......... 52
3.1.3 Thiết kế điều khiển động cơ AFPM bằng phương pháp Backstepping-SMC
57
3.2 Các kết quả mô phỏng ........................................................................................ 64
3.2.1 Mô phỏng hệ thống với mạch vòng ngoài PID, mạch vòng dòng điện
PID 64
3.2.2 Mô phỏng hệ thống với mạch vòng ngoài Backstepping-trượt ............... 71
CHƯƠNG 4 :
HỆ THỐNG THÍ NGHIỆM VÀ KẾT QUẢ THỰC NGHIỆM .... 80
4.1 Hệ thống thí nghiệm ........................................................................................... 80
4.2 Kết quả thực nghiệm........................................................................................... 96
4.2.1 Động cơ chạy với tốc độ nhỏ hơn tốc độ định mức n=1500 vòng/phút .. 96
KẾT LUẬN VÀ KIẾN NGHỊ................................................................................. 100
DANH MỤC CÔNG TRÌNH KHOA HỌC CÓ LIÊN QUAN ĐẾN LUẬN ÁN . 102
TÀI LIỆU THAM KHẢO ....................................................................................... 104
PHỤ LỤC ................................................................................................................ 116
Số hóa bởi Trung tâm Học liệu và Công nghệ thông tin – ĐHTN
http://lrc.tnu.edu.vn
Danh mục các bảng biểu
DANH MỤC CÁC BẢNG BIỂU
Bảng 4.1 Thông số kỹ thuật nguồn DC GW INSTEK PSW 80-40.5 .......................84
Bảng 4.2 Thông số kỹ thuật của Encoder RE30E-500-213-1 ...................................86
Bảng 4.3 Thông số kỹ thuật cảm biến đo khoảng cách SENTEC LS 500D-2A.......86
Số hóa bởi Trung tâm Học liệu và Công nghệ thông tin – ĐHTN
http://lrc.tnu.edu.vn
Danh mục các ký hiệu, các chữ viết tắt
DANH MỤC CÁC KÝ HIỆU, CÁC CHỮ VIẾT TẮT
Danh mục các ký hiệu
Ký hiệu
B, B
Đơn vị
T
Ý nghĩa
Mật độ từ thông, mật độ từ thông ở khe hở không khí
Ma trận chuyển đổi từ hệ tọa độ ba pha sang hệ tọa độ 2
C3/2, C2/3
pha và ngược lại
Ma trận chuyển đổi từ hệ tọa độ cố định ba pha sang hệ
C3s/2r, C2r/3s
tọa độ quay 2 pha và ngược lại
Ma trận chuyển đổi từ hệ tọa độ cố định 2 pha sang hệ
C2s/2r, C2r/2s
tọa độ quay 2 pha và ngược lại
Ma trận điện cảm
L
F1 , F2
N
Lực điện từ do động cơ 1, động cơ 2 sinh ra
FL
N
Lực ngoài tác động vào trục động cơ
Sức từ động kích từ, stđ tổng 3 pha stator, stđ tổng
Fp, Fs, F
go
mm
Khe hở không khí giữa Stator và rotor
i,i
A
Thành phần trục , của dòng điện
iA, iB, iC
A
Các dòng điện pha
id, iq
A
Dòng điện trên trục d,q
Ip , If
A
Dòng kích từ một chiều
isd, isq
A
Thành phần trục d,q của dòng điện stator
KGm2 Mô men quán tính
J, jr
Hệ số khuếch đại của nghịch lưu
Knl
Lsd, Lsq
H
Thành phần điện cảm dọc trục, ngang trục
M 1 , M 2 , m1 , m2
Nm
Mô men điện từ do động cơ 1, động cơ 2 sinh ra
Mđt
Nm
Mô men điện từ
N
Số vòng dây
np
Số đôi cực
R
Ma trận điện trở
Rs , Rr
Điện trở cuộn dây stator, rotor
S
m2
Diện tích mặt cắt của đường sức từ
Số hóa bởi Trung tâm Học liệu và Công nghệ thông tin – ĐHTN
http://lrc.tnu.edu.vn
Danh mục các ký hiệu, các chữ viết tắt
m2
Sp
Diện tích cực từ tại khe hở không khí
Tsd, Tsq
s
Hằng số thời gian
Te, Tm
s
Hằng số thời gian điện từ, hằng số thời gian điện cơ
u, u
V
Điện áp trên trục ,
uA, uB, uC
V
Các điện áp pha
ud, uq
V
Điện áp trên trục d,q
usd, usq
V
Thành phần trục d,q của điện áp stator
Năng lượng điện từ
Wm
wl
mm2 Kích thước mạch từ
z
mm
Độ dịch chuyển của lõi thép, rotor
,
Wb
Từ thông
p
Wb
Từ thông cực từ
rad
Góc lệch giữa trục d và trục
Wb
Từ thông
o
Tm/A Độ từ thẩm của không khí
s, 1
rad/s Tốc độ góc của từ trường stator
, m
rad
s
Vị trí góc
Hằng số thời gian
Các chỉ số bên phải, trên cao:
f
đại lượng mô tả trên hệ tọa độ T4R (hệ tọa độ dq quay đồng bộ với
vector từ thông.
s, r
đại lượng mô tả trên hệ tọa độ cố định với stator, rotor
Số hóa bởi Trung tâm Học liệu và Công nghệ thông tin – ĐHTN
http://lrc.tnu.edu.vn
Danh mục các ký hiệu, các chữ viết tắt
Danh mục các chữ viết tắt
Chữ viết
tắt
AFPM
AGBM
Ý nghĩa
Axial Flux Permanent Magnet (từ thông dọc trục kích thích vĩnh
cửu)
axial gap self- bearing machine (máy điện tự nâng có khe hở dọc
trục)
AMB
Active Magnetic Bearing (ổ đỡ từ chủ động)
AMM
amorphous magnetic materials (vật liệu từ vô định hình)
ĐB
Đồng bộ
ĐC
Động cơ
ĐCĐB
Động cơ đồng bộ
ĐH
Đại học
BSCCO
Bismuth strontium calcium copper oxide
CAN
Controller Area Network
CNC
Computer Numeric Control (Điều khiển số dùng máy tính)
CFD
computational fluid dynamic (động học chất lỏng tính toán)
DSP
Digital signal processor (Xử lý tín hiệu số)
DSSR
Double stator single rotor (hai stator một rotor)
EV
electric vehicle (Xe điện)
FEA
Finite Element Analysis (Phân tích phần tử hữu hạn)
FEM
Finite element method (Phương pháp phần tử hữu hạn)
FSCW
Fractional-slot concentrated-winding (dây quấn tập trung rãnh
phân số)
FVA
Finite Volume Analysis (phân tích thể tích hữu hạn)
HTC
high-temperature superconducting (siêu dẫn nhiệt độ cao)
LQG
Linear Quadratic Gaussian
LSAFPM
Line start AFPM (AFPM khởi động trực tiếp)
LSPM
Line start permanent magnet (Máy điện kích thích vĩnh cửu khởi
động trực tiếp)
MIMO
multiple-input multiple-output (nhiều đầu vào nhiều đầu ra)
NCVC
nam châm vĩnh cửu
Số hóa bởi Trung tâm Học liệu và Công nghệ thông tin – ĐHTN
http://lrc.tnu.edu.vn
Danh mục các ký hiệu, các chữ viết tắt
NGTL
NOVA Gas Transmission Ltd
NS
North – South (Bắc – Nam)
PC
Personal Computer (máy vi tính)
PPC
PowerPC (Máy tính chuyên dụng)
PID
Proportional Integral Derivative (tỷ lệ vi tích phân)
PM
Permanent Magnet (Nam châm vĩnh cửu)
RFPM
Radial Flux Permanent Magnet (máy điện kích thích vĩnh cửu từ
thông hướng tâm)
LRU
Least recently used
SMC
Sliding Mode Control (Điều khiển trượt)
SMC
soft magnetic composites, soft magnetic compound (Hợp chất từ
mềm)
SS
South – South (Nam – Nam)
SSDR
Single stator double rotor (Một stator hai rotor)
SSSR
Single stator single rotor (Một stator một rotor)
stđ
sức từ động
TFPM
transverse flux PM ()
T4 R
Tựa theo từ thông rotor
XNCN
Xí nghiệp công nghiệp
YBCO
yttrium barium copper oxide
Số hóa bởi Trung tâm Học liệu và Công nghệ thông tin – ĐHTN
http://lrc.tnu.edu.vn
Danh mục hình vẽ
DANH MỤC HÌNH VẼ
Hình 1 Hình ảnh của động cơ đồng bộ từ thông dọc trục, kích từ nam châm vĩnh cửu,
có tích hợp ổ từ chặn chuyển động dọc trong dây quấn stator động cơ ......................2
Hình 1.1 ĐC điện-từ với rotor dạng đĩa theo bằng sáng chế số 405 858,1889 của N.
Tesla (a- hình chiếu đứng, b- hình chiếu cạnh, c- mặt cắt dọc). .................................6
Hình 1.2 Các modul cơ bản của ĐC AFPM................................................................9
Hình 1.3 Các cấu hình của máy điện từ thông dọc trục NCVC ..................................9
Hình 1.4 Mặt cắt mô hình ĐC điện thông dụng ........................................................11
Hình 1.5 Ổ đỡ từ hướng tâm chủ động .....................................................................12
Hình 1.6 Mặt cắt mô hình ĐC điện thông dụng có tích hợp ổ đỡ từ hướng tâm và
hướng trục (1: Trục; 2: Rotor; 3: Stator; 4: Ổ từ hướng tâm; 5: Ổ từ dọc trục). ......13
Hình 1.7 Cấu tạo ổ từ chủ động (AMB): hướng tâm (a), dọc trục (b). .....................13
Hình 1.8 Mặt cắt ĐC AFPM có tích hợp ổ đỡ từ hai đầu trục ..................................14
Hình 2.1 Sơ đồ cấu trúc của động cơ AFPM tích hợp chức năng ổ đỡ từ dọc trục ..30
Hình 2.2 Vector dòng stator khi ĐCĐB làm việc trong dải tốc độ quay danh định .32
Hình 2.3 Mô hình liên tục của của động cơ đồng bộ từ thông dọc trục ....................36
Hình 2.4 Mạch từ lõi thép chữ C...............................................................................37
Hình 2.5 Quan hệ phi tuyến giữa từ thông móc vòng và dòng điện i ...................40
Hình 2.6 Mô hình xác định các từ thông móc vòng của ĐC AFPM .........................42
Hình 2.7 Mô hình xác định từ thông móc vòng và lực đẩy kéo của stator 1 (a) và stator
2 (b) với rotor ............................................................................................................43
Hình 2.8 Sơ đồ thay thế mạch từ của ĐC đồng bộ từ thông dọc trục NCVC ...........43
Hình 2.9 Sơ đồ cấu trúc đầy đủ của ĐC AFPM có tích hợp ổ từ dọc trục ...............49
Hình 3.1 Cấu trúc điều khiển vectơ của động cơ đồng bộ từ thông dọc trục ...........51
Hình 3.2 Cấu trúc dòng điện của động cơ AFPM .....................................................53
Hình 3.3 Mạch vòng điều khiển dòng điện có khâu tách kênh Rii. ..........................54
Hình 3.4 Mạch vòng điều khiển tốc độ .....................................................................55
Hình 3.5 Mạch vòng điều khiển khoảng cách trục ...................................................57
Hình 3.6 Cấu trúc mô phỏng điều khiển động cơ AFPM .........................................65
Hình 3.7 Kết quả mô phỏng động cơ AFPM trong chế độ làm việc với tốc độ định
mức và chưa có lực dọc trục tác động. ......................................................................66
Số hóa bởi Trung tâm Học liệu và Công nghệ thông tin – ĐHTN
http://lrc.tnu.edu.vn
Danh mục hình vẽ
Hình 3.8 Kết quả mô phỏng động cơ AFPM trong chế độ làm việc với tốc độ định
mức và có lực tác động dọc trục. ..............................................................................67
Hình 3.9 Kết quả mô phỏng động cơ AFPM trong chế độ làm việc có tải và chưa có
lực tác động dọc trục. ................................................................................................69
Hình 3.10 Kết quả mô phỏng động cơ AFPM trong chế độ làm việc có tải và có lực
tác động dọc trục. ......................................................................................................70
Hình 3.11 Cấu trúc mô phỏng với bộ điều khiển Backstepping ...............................71
Hình 3.12 Kết quả mô phỏng với mạch vòng ngoài Backstepping-trượt .................72
Hình 3.13 Kết quả mô phỏng với bộ điều khiển Backstepping động cơ không tải và
có lực dọc trục tác động ............................................................................................74
Hình 3.14 Kết quả mô phỏng với bộ điều khiển Backstepping động cơ có tải và không
có lực dọc trục tác động ............................................................................................75
Hình 3.15 Kết quả mô phỏng với bộ điều khiển Backstepping động cơ có tải và có
lực dọc trục tác động .................................................................................................76
Hình 3.16 So sánh kết quả mô phỏng của hai phương pháp ....................................78
Hình 4.1 Cấu trúc của hệ thống thí nghiệm ..............................................................80
Hình 4.2 Động cơ AFPM ..........................................................................................81
Hình 4.3 Stator của động cơ AFPM ..........................................................................81
Hình 4.4 Sơ đồ đấu dây Stator của động cơ AFPM ..................................................82
Hình 4.5 Rotor của động cơ AFPM ..........................................................................82
Hình 4.6 Động cơ AFPM với tải là máy phát một chiều ..........................................83
Hình 4.7 Bộ nguồn một chiều lập trình được ............................................................83
Hình 4.8 Cấu tạo và nguyên lý hoạt động của encoder.............................................85
Hình 4.9 Encoder RE30E-500-213-1 của NIDEC COPAL ......................................85
Hình 4.10 Cảm biến đo khoảng cách SENTEC LS 500D-2A ..................................86
Hình 4.11 dSPACE DS1104 .....................................................................................87
Hình 4.12 Connector/LED panel CLP1104 ..............................................................88
Hình 4.13 Cấu trúc phần cứng của DS1104 ..............................................................89
Hình 4.14 Thư viện dSPACE RTI1104 ....................................................................92
Hình 4.15 Giao diện điều khiển hệ thống .................................................................93
Hình 4.16 Hệ thống thí nghiệm động cơ AFPM .......................................................93
Hình 4.17 Toolbars của ControlDesk .......................................................................94
Hình 4.18 Thiết lập thời gian quan sát thí nghiệm Capture settings .........................95
Số hóa bởi Trung tâm Học liệu và Công nghệ thông tin – ĐHTN
http://lrc.tnu.edu.vn
Danh mục hình vẽ
Hình 4.19 Kết quả thực nghiệm ĐC chạy với tốc độ nhỏ hơn tốc độ định mức ......97
Hình 4.20 Kết quả thực nghiệm động cơ với tốc độ bằng tốc độ định mức .............98
Số hóa bởi Trung tâm Học liệu và Công nghệ thông tin – ĐHTN
http://lrc.tnu.edu.vn
Mở đầu
MỞ ĐẦU
1. Tính cấp thiết của đề tài
Các hệ truyền động sử dụng động cơ điện (ĐC) xoay chiều đã được nghiên cứu
phát triển và ứng dụng rộng rãi trong nhiều ứng dụng từ những năm 80 của thế kỷ 20,
nhờ khả năng hoạt động tin cậy, chi phí thấp, kích thước nhỏ gọn, làm việc chắc chắn
và giá thành rẻ. Tuy nhiên, vẫn còn một vấn đề tồn tại trong hệ truyền động xoay
chiều là yêu cầu bảo dưỡng và thay thế các vòng bi cơ. Trong nhiều ứng dụng thực
tế, vấn đề bảo dưỡng và thay thế vòng bi cơ thực sự rất khó khăn đòi hỏi chuyên gia
trình độ cao hoặc chi phí rất lớn. Thêm vào đó, dầu bôi trơn không thể sử dụng trong
môi trường chân không, môi trường nhiệt độ rất cao, rất thấp hoặc trong các môi
trường yêu cầu rất sạch (chế biến dược phẩm, thực phẩm, công nghệ vật liệu,...) và
tốc độ rất cao. Để đáp ứng được các yêu cầu này thì hệ thống truyền động điện dùng
ổ đỡ từ sử dụng động cơ đồng bộ (ĐCĐB) là một trong những lựa chọn phù hợp nhất
hiện nay và đang được đẩy mạnh nghiên cứu ở nhiều nước trên thế giới.
Các lĩnh vực ứng dụng chính của hệ thống truyền động điện dùng ổ đỡ từ sử
dụng ĐCĐB có thể phân loại sơ bộ như sau:
- Nâng cao hiệu suất của hệ truyền động: Do trục quay của ĐCĐB chuyển động
không có tiếp xúc với phần cố định, nên tổn hao do ma sát gần như bằng không. Điều
này cho phép ĐCĐB làm việc với hiệu suất và tốc độ quay rất cao. Các ứng dụng
dạng này thường tập trung vào các máy nén cao tốc, các máy công cụ [3].
- Các ngành công nghệ sạch: Trục quay của ĐCĐB không tiếp xúc với phần
tĩnh do đó không có các hạt bụi do mài mòn tạo ra cũng như không cần sử dụng các
chất bôi trơn. Kết quả là không gây ô nhiễm tới môi trường xung quanh. Với ưu điểm
này hệ thống truyền động điện dùng ổ đỡ từ sử dụng ĐCĐB đang được đẩy mạnh
nghiên cứu ứng dụng trong các ngành công nghệ vật liệu, công nghệ hóa học, công
nghệ sinh học (bơm hóa chất [4], bơm máu trong tim nhân tạo [5][6]..)
- Trong các môi trường khắc nghiệt: Nhờ vào việc loại bỏ được chất bôi trơn,
hệ thống truyền động điện dùng ổ đỡ từ sử dụng ĐCĐB còn được nghiên cứu ứng
dụng trong các môi trường rất lạnh [7], [8]
Qua những phân tích đánh giá trên, dễ dàng nhận thấy rằng hệ thống truyền
động điện dùng ổ đỡ từ sử dụng ĐCĐB là một sản phẩm khoa học công nghệ mới
Số hóa bởi Trung tâm Học liệu và Công nghệ thông tin – ĐHTN
http://lrc.tnu.edu.vn
Mở đầu
trên thế giới. Vì vậy, nghiên cứu về điều khiển động cơ đồng bộ bằng các bộ điều
khiển hiện đại là rất cấp thiết và có nhiều ý nghĩa.
2. Đối tượng, phạm vi và phương pháp nghiên cứu
Đối tượng nghiên cứu: Đối tượng nghiên cứu của luận án là nghiên cứu ĐCĐB
từ thông dọc trục có tích hợp ổ đỡ từ dọc trục theo hướng thiết kế điều khiển để ĐC
đồng thời sinh ra mô men quay và lực dọc trục để giữ rotor của ĐC ở vị trí cân bằng
mà không cần bổ sung thêm ổ đỡ từ chặn chuyển động dọc trục.
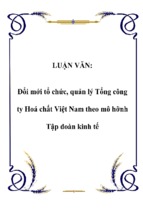
ĐC điện đồng bộ từ thông dọc trục kích từ nam châm vĩnh cửu (động cơ AFPM)
có tích hợp ổ đỡ từ dọc trục, khi sử dụng hai ổ từ hướng tâm ở hai đầu trục như minh
họa trên hình 1, hiện đang được xếp loại sản phẩm công nghệ cao chứa đựng nhiều
hàm lượng chất xám và đồng thời cũng là sản phẩm công nghệ xanh mới, mặc dù có
những hạn chế trong việc ứng dụng rộng rãi do kích thước lớn và giá thành cao,…
Nhưng trong tương lai gần, khi các nghiên cứu sản xuất được các vật liệu mới để
giảm kích thước và giảm giá thành thì sự thay thế của ĐC điện loại này cho ĐC điện
thông dụng trong các lĩnh vực công nghệ sạch, thiết bị y tế, thiết bị quốc phòng và
công nghiệp vũ trụ,… là điều tất yếu.
Hình 1 Hình ảnh của động cơ đồng bộ từ thông dọc trục, kích từ nam châm vĩnh cửu, có
tích hợp ổ từ chặn chuyển động dọc trong dây quấn stator động cơ
Phạm vi nghiên cứu:
Luận án tập trung nghiên cứu tổng quan về AFPM, từ đó đề xuất chọn cấu hình
nghiên cứu gồm: Động cơ đồng bộ từ thông dọc trục kích từ nam châm vĩnh cửu,
Số hóa bởi Trung tâm Học liệu và Công nghệ thông tin – ĐHTN
http://lrc.tnu.edu.vn
Mở đầu
có tích hợp ổ từ chặn chuyển động dọc trục trong dây quấn stator động cơ và hai
ổ đỡ từ hướng tâm hai đầu trục. Trên cơ sở cấu hình đã chọn, tiến hành xây dựng
mô hình toán học của ĐC sau đó thực hiện cấu trúc điều khiển đảm bảo ĐC vừa sinh
mô men quay vừa tạo lực dọc trục để giữ rotor tại vị trí cân bằng. Phân tích và lựa
chọn phương pháp điều khiển phù hợp với đối tượng nhằm đạt được chất lượng điều
khiển cao nhất.
Phương pháp nghiên cứu:
Phương pháp nghiên cứu sử dụng là kết hợp giữa nghiên cứu lý thuyết với thực
nghiệm bằng máy tính và mô hình thực. Các vấn đề khoa học và công nghệ được
tiến hành theo phương pháp kinh điển về nghiên cứu phát triển đó là:
- Nghiên cứu lý thuyết chung về ĐCĐB tạo lực hút dọc trục.
- Ứng dụng các phần mềm mô phỏng xây dựng cấu trúc và thuật điều khiển đảm
bảo phân ly giữa lực nâng và mômen điện từ.
- Nghiên cứu bằng thực nghiệm trên mô hình thực và hiệu chỉnh.
3. Mục tiêu của luận án
Mục tiêu chung của luận án là nghiên cứu và thiết kế điều khiển cho hệ truyền
động không tiếp xúc sử dụng ĐCĐB từ thông dọc trục. Mục tiêu nghiên cứu của luận
án được cụ thể như sau:
- Xây dựng được mô hình của hệ thống truyền động điện dùng ổ đỡ từ sử dụng
ĐCĐB phục vụ thử nghiệm.
- Nghiên cứu ứng dụng điều khiển phi tuyến đảm bảo chất lượng hệ thống truyền
động điện dùng ổ đỡ từ sử dụng ĐCĐB. Kiểm chứng chất lượng điều khiển hệ thống
bằng mô phỏng và thực nghiệm.
4. Những đóng góp mới, ý nghĩa khoa học và thực tiễn của luận án
Những đóng góp mới
- Xây dựng được mô hình toán cho động cơ AFPM và tính lực tác dụng dọc trục
có kể đến tương tác của các dòng điện isd, isq và chuyển dịch dọc trục z;
- Thiết kế được bộ điều khiển dòng điện với giải pháp tách kênh triệt để bằng
các bộ bù phân ly;
- Thiết kế bộ điều khiển tốc độ bằng phương pháp Lyapunov sử dụng kỹ thuật
Backstepping;
- Thiết kế thành công bộ điều khiển trượt cho mạch vòng vị trí.
Số hóa bởi Trung tâm Học liệu và Công nghệ thông tin – ĐHTN
http://lrc.tnu.edu.vn
Mở đầu
Các kết quả mô phỏng và thực nghiệm đã chứng minh các bộ điều khiển cho ba
mạch vòng: Dòng điện, tốc độ và vị trí đáp ứng tốt các yêu cầu đề ra.
Ý nghĩa khoa học của luận án
- Trong hệ thống truyền động này, trục của ĐC trước khi quay đã được nâng
hoàn toàn trong không gian nhờ hai ổ đỡ từ hướng tâm nên nó không tiếp xúc với bất
kỳ vật nào, do đó chuyển động quay của trục rotor không gây ra hao mòn, không có
ma sát và không cần chất bôi trơn cũng như có khả năng chuyển động ở tốc độ rất
cao.
- Động cơ đồng bộ từ thông dọc trục kích từ nam châm vĩnh cửu sẽ tạo ra mô
men quay trong hệ thống truyền động điện dùng ổ đỡ từ. Điều khiển thành công hệ
truyền động này sẽ tạo ra sản phẩm có hàm lượng khoa học công nghệ. Ngoài ra cũng
góp phần đáng kể trong việc tiếp cận và làm chủ được một ngành công nghệ tiên tiến
trên thế giới về ứng dụng đệm từ trường.
- Do có tính năng kết hợp vừa tạo mô men quay, vừa tạo lực hút dọc trục, nên
động cơ đồng bộ từ thông dọc trục kích từ nam châm vĩnh cửu không phải sử dụng
thêm ổ từ chặn chuyển động dọc trục.
Ý nghĩa thực tiễn của luận án
Kết quả nghiên cứu của luận án có thể ứng dụng điều khiển động cơ trong các
hệ truyền động có tốc độ cao và siêu cao (bơm hêli lỏng trong máy chụp cộng hưởng
từ), cho xe điện với công suất đến 130 KW, cho các hệ tích trữ cơ năng bằng bánh
đà,…
5. Bố cục của luận án
Luận án gồm phần mở đầu, 04 chương và kết luận, được bố cục như sau:
Chương 1: Tổng quan về ĐCĐB từ thông dọc trục có tích hợp ổ đỡ từ
Chương 2: Mô hình hóa ĐCĐB từ thông dọc trục có tích hợp ổ đỡ từ
Chương 3: Điều khiển ĐCĐB từ thông dọc trục có tích hợp ổ đỡ từ
Chương 4: Hệ thống thí nghiệm và kết quả thực nghiệm
Kết luận và kiến nghị
Số hóa bởi Trung tâm Học liệu và Công nghệ thông tin – ĐHTN
http://lrc.tnu.edu.vn
Chương 1: Tổng quan về ĐCĐB từ thông dọc trục
CHƯƠNG 1 : TỔNG QUAN VỀ ĐCĐB TỪ THÔNG DỌC TRỤC CÓ TÍCH
HỢP Ổ ĐỠ TỪ
1.1
Mở đầu
Ngày nay, cùng với sự phát triển mạnh mẽ của công nghệ điện tử công suất,
vi xử lý và kỹ thuật máy tính,... thì việc điều chỉnh tốc độ ĐC xoay chiều trở nên dễ
dàng và đạt được những chỉ tiêu chất lượng cao. Trong các ngành công nghiệp, các
hệ thống truyền động điện sử dụng ĐC điện một chiều đang được thay thế bằng hệ
thống truyền động điện sử dụng ĐC điện xoay chiều ba pha (ĐCXCBP). Do đó, các
hệ thống truyền động biến tần điều khiển ĐCXCBP cũng phát triển mạnh mẽ và mang
lại lợi ích kinh tế cao trong sản xuất. Các hệ truyền động ĐCXCBP đã được nghiên
cứu phát triển và ứng dụng rộng rãi từ những năm 80 của thế kỷ trước nhờ khả năng
hoạt động tin cậy, chi phí thấp, kích thước nhỏ gọn. Đặc biệt, hệ biến tần điều khiển
ĐCXCBP đang được nhiều nhà nghiên cứu quan tâm vì hệ thống này có nhiều ưu
điểm như: tiết kiệm năng lượng; mômen mở máy lớn do vậy kéo được tải nặng khi
khởi động; việc điều chỉnh tốc độ đơn giản; phạm vi điều chỉnh tốc độ rộng; có khả
năng điều chỉnh vô cấp tốc độ,... ĐCXCBP có các loại đồng bộ và không đồng bộ.
Ưu điểm nổi bật của ĐCĐB là độ ổn định tốc độ cao, các chỉ tiêu năng lượng như
hiệu suất, hệ số cosφ tốt, độ tin cậy cao.
Chương này tập trung nghiên cứu tổng quan ĐCĐB từ thông dọc trục kích từ
nam châm vĩnh cửu trong điều kiện ràng buộc là hai đầu trục của ĐC sử dụng hai ổ
đỡ từ. Các ổ đỡ từ này chỉ đỡ cho trục rotor quay mà không chặn được dịch chuyển
dọc trục của rotor. Để chặn dịch chuyển dọc trục của rotor khi quay, tác giả đề xuất
loại ĐCĐB từ thông dọc trục có cấu tạo đặc biệt, vừa tạo ra mômen quay cho rotor
vừa chặn được chuyển dịch dọc trục của nó. Điều đó, không làm tăng kích thước của
ĐC và cũng không phải sử dụng thêm thiết bị chặn cơ khí nào.
Máy điện đã trải qua một chặng đường phát triển dài, bắt đầu từ những thí
nghiệm của Michael Faraday (1831) và ngày nay là những sản phẩm có thiết kế tinh
tế do các kĩ sư tài giỏi chế tạo theo nhiều cách thức khác nhau với mục đích làm cho
kích thước ĐC nhỏ hơn, mạnh mẽ hơn, mang tính động học và có hiệu suất tốt hơn.
Các loại máy điện xoay chiều dùng nhiều trong sản xuất thường là ĐC điện
không đồng bộ (KĐB), vì loại ĐC điện này có những đặc điểm như cấu tạo đơn giản,
làm việc chắc chắn, bảo quản dễ dàng và giá thành hạ.
Số hóa bởi Trung tâm Học liệu và Công nghệ thông tin – ĐHTN
http://lrc.tnu.edu.vn
Chương 1: Tổng quan về ĐCĐB từ thông dọc trục
Tuy nhiên, các ĐC điện đồng bộ (ĐB) do có những ưu điểm nhất định nên trong
thời gian gần đây đã được sử dụng rộng rãi hơn và có thể so sánh với ĐC điện KĐB
trong lĩnh vực truyền động điện. Về ưu điểm, trước hết phải nói là ĐC điện ĐB do
được kích thích bằng dòng điện một chiều có thể làm việc với cos bằng 1 và không
cần lấy công suất phản kháng từ lưới điện, kết quả là hệ số công suất của lưới điện
được nâng cao, làm giảm được tổn thất điện áp lưới và tổn hao công suất trên đường
dây. Ngoài ưu điểm chính đó, ĐC điện ĐB còn ít chịu ảnh hưởng đối với sự thay đổi
điện áp của lưới điện do mômen của ĐC chỉ tỷ lệ với điện áp nguồn cung cấp (U),
trong khi mômen của ĐC điện KĐB tỷ lệ với bình phương của điện áp nguồn cung
cấp (U2). Vì vậy, khi điện áp của lưới bị sụt thấp do sự cố, khả năng giữ tải của ĐC
điện ĐB lớn hơn; trong trường hợp đó nếu tăng kích thích, ĐC điện đồng bộ có thể
làm việc an toàn và cải thiện được điều kiện làm việc của cả lưới điện. Cũng phải nói
thêm rằng, hiệu suất của ĐC điện ĐB cao hơn hiệu suất của ĐC điện KĐB vì ĐC
điện ĐB có tổn hao sắt từ nhỏ hơn. Nhược điểm của ĐC điện ĐB so với ĐC điện
KĐB ở chỗ cấu tạo phức tạp, đòi hỏi phải có máy kích từ hoặc nguồn cung cấp dòng
điện một chiều khiến cho giá thành cao (chủ yếu đối với máy điện đồng bộ cực lồi
công suất lớn). Hơn nữa, việc mở máy ĐC điện đồng bộ cũng phức tạp và việc điều
chỉnh tốc độ của nó chỉ có thể thực hiện được bằng cách thay đổi tần số của nguồn
điện cung cấp.
1.2
Sự phát triển của máy điện đồng bộ kích từ nam châm vĩnh cửu từ thông
dọc trục
Hình 1.1 ĐC điện-từ với rotor dạng đĩa theo bằng sáng chế số 405 858,1889 của N. Tesla
(a- hình chiếu đứng, b- hình chiếu cạnh, c- mặt cắt dọc).
Khi tìm hiểu về lịch sử phát triển của máy điện cho thấy các máy điện đầu tiên
là các máy điện từ thông dọc trục (M. Faraday, 1831, Nhà phát minh vô danh với các
nam châm vĩnh cửu đầu tiên, 1832, W. Ritchie, 1833, B. Jacobi, 1834). Nguyên mẫu
Số hóa bởi Trung tâm Học liệu và Công nghệ thông tin – ĐHTN
http://lrc.tnu.edu.vn
- Xem thêm -